Projects
Welcome to my projects page! Here are some of the projects I've worked on in academic, personal, and professional settings. All of my projects aren't listed here, but I will update this page as I go along. If you have any questions about a specific project, feel free to reach out!
Fetch Robot Arm Position Control with Reinforcement Learning
#robotics#reinforcement-learning#mujoco#simulationTraining of a reinforcement learning agent to control the position of a Fetch robot arm in a simulated environment. The agent learns to move the arm to a static target positions with a PPO algorithm. The agent is then evualated using a moving target position.
Double Inverted Pendulum Control with Reinforcement Learning
#robotics#reinforcement-learning#mujoco#simulationTraining of a reinforcement learning agent to control a double inverted pendulum in a simulated environment. The agent learns to balance the pendulum only by applying forces to the base of the pendulum. The agent is trained using a CrossQ algorithm with a randomly generated starting position.
French Robotic Cup 2025
#robotics#competition#CDFR#project management#control loop#embeddedThird participation of a new team in the French Robotic Cup. This year, we had to build an autonomous robot capable of building castles made out of food cans and wooden planks. The robot had to be able to detect the cans and planks, pick them up, and place them in a designated area while avoiding the other robots on the field. The robot also had to deploy a self made flag to score extra points as well as avoiding smaller robots that could block its path.
- Project management of a 7-person team
- Closed-loop control of a differential robotic base

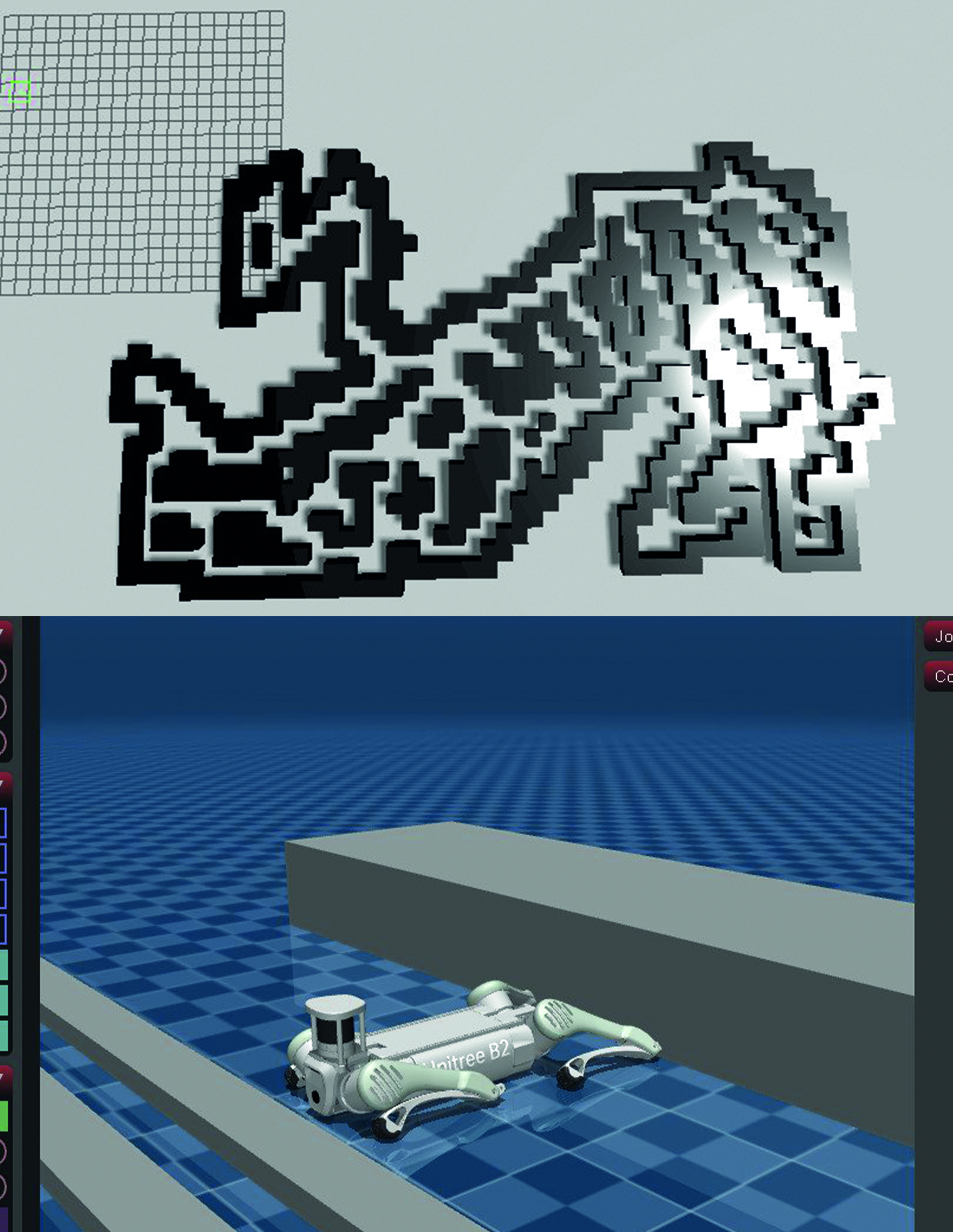
Implementation of a navigation algorithm for a Unitree B2 quadruped robot using ROS2
#robotics#ros2#quadruped#simulation#mujocoThe goal of this academic project was to evualate the Unitree B2 quadruped robot in a simulated environment for sewer network inspection. The robot had to be able to navigate autonomously knowing its position when entering the sewer. The robot had then to be able to find a way to a desired point in the sewer network whithout prior knowledge of the network. The project was done in a team of 3 people.
- Implementation of a navigation algorithm based on the DFS algorithm in ROS2
- Simulation of the robot in Mujoco
- Generation of a 3D model of the sewer network from a 2D map
Detection of Asian hornets using computer vision
#vision#detectionThis project was based on a project made by a startup in order to protect bee hives from the invasion of Asian hornets by shooting them with a high power laser. The goal was to detect the hornets using a camera and a computer vision algorithm. The algorithm had to be able to detect the hornets in real time and send the information to the laser system in order to shoot them.

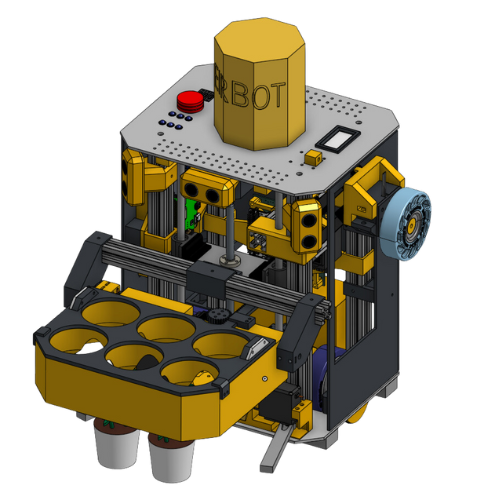
French Robotic Cup 2024
#robotics#competition#CDFR#project management#vision#control loop#brushless#embeddedThe second participation of my team in the French Robotic Cup. This year, we had to build an autonomous robot capable of sorting small pots of plants. The robot had to be able to detect the pots, pick them up, and place them in a designated area while avoiding the other robots on the field.
- Project management of a 6-person team
- Design of an adaptive strategy based on computer vision
- Closed-loop control of a differential robotic base with custom firmware for brushless motor control
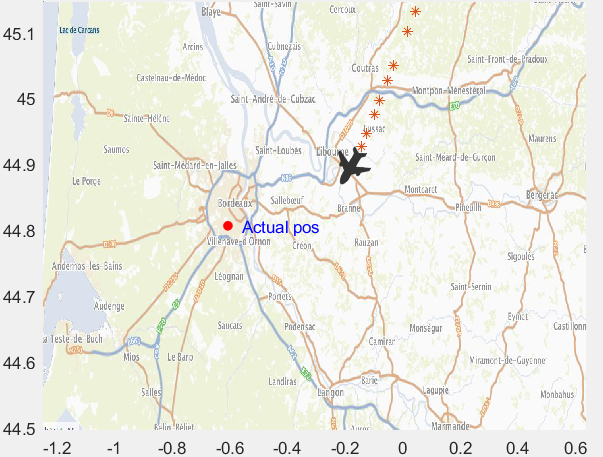
Simulation of an ADS-B transmitter
#simulation#adsb#matlab#signal processingThis project was my first project during my second year of engineering school. The goal was to simulate an ADS-B transmitter in Matlab in order to recreate an application such as FlightRadar. Once the simulation was done in Matlab, we were able to connect to our school's real antenna and display in real time planes flying over our school.
French Robotic Cup 2023
#robotics#competition#CDFR#embeddedThis project was my first step into the world of robotics. The goal was to build a robot capable of autonomously stacking disks of different colors while putting a ball in the center of the stack. The pile had to be moved to a designated area while avoiding the other robots on the field in order to score points.
- Project management of a 7-person team
- Integration of obstacle avoidance solutions based on LiDAR
- Embedded programming
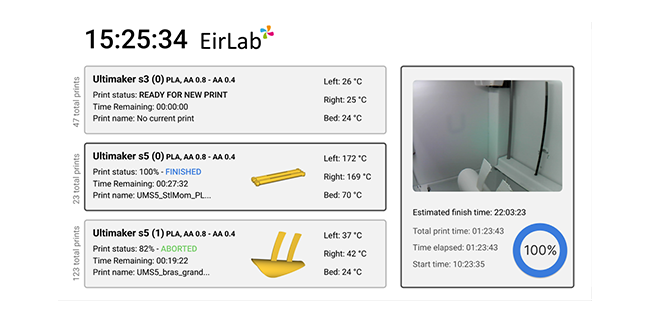
Ultiwatcher
#3D printer#iot#web#apiThe Ultiwatcher is a project I made in order to monitor my 3D printer. The goal was to be able to monitor the printer stored in a remote room in a maker space. The project was a web application hosted on a Raspberry Pi. The application was able to monitor the printer and send notifications when the print was finished or when an error occurred.
Feel free to reach out for more details about these projects!